Throttle End Point Settings:
Steering end point setting is pretty basic. Just adjust the end point until the servo does not make any noise at maximum steering angle. The throttle setting is done by listening to the motor. It turns out, on the mini-z ASF board, throttle max out at 56% of full throttle. That is hard to believe, so many people set their throttle end point at 100% to be sure their car is getting maximum speed. If you set the throttle end point at 100%, then anything beyond half throttle is wasted action. The problem with wasting throttle travel is that it give you less throttle travel room to work with at low speed. Since full throttle is reached at only half throttle, it becomes hard to control throttle precisely with the small amount of throttle travel. This is especially true for modified cars. For braking, max braking is reached at only 43% braking throttle. Setting reverse at 100% would obviously be bad. Braking becomes too sensitive.
Forward throttle end point should be set at around 56%, and braking end point should be set at around 43%. This is testing with an oscilloscope for ASF band using both my KO PROPO radios. If you are using ASF band, chances are other radios will be similar. The way to set forward end point is to apply maximum throttle while listening to the car motor. If you adjust the end point slowly, and wait for the motor to settle, you can definitely hear a change in pitch as you increase the end point. Don't press the end point setting adjustment button too fast, or you will miss the change in pitch. When motor stop changing pitch with increase in end point adjustment, you have reached the maximum. Do the same for reverse side.
Seeing is Believing:
It seems that after half throttle, the motor is already maxed out. However, psychologically, it is hard not to set the throttle end point at anything less than 100% especially in stock class. It feels like you are short changing yourself. To find out, I finally hooked up an old surplus oscilloscope to the car.
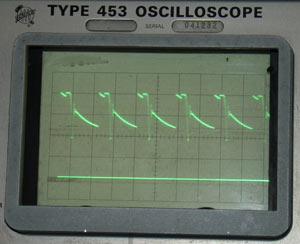
Here is the trace at partial throttle. You can see on the top trace, full voltage is applied to the motor for about a fifth of the cycle. The drive frequency is about 1000 hz. That is low for a speed control. Larger scale RC cars run their speed control at 20,000 Hz or higher. This is why when you throttle up, you can hear the motor make a high pitched hum. At greater throttle setting, full voltage is applied to the motor for a longer fraction of the cycle. The sloping down portion of the curve is the dropping down of motor current when power is taken off of the motor. The motor is basically an electric magnet, so it has some electrical inertia. Curent continues to flow in the motor even after voltage is taken off. There is a flyback diode in the speed control to allow current to continue to flow, and drop off gradually, since you cannot take current off of a coil instantly. Chopping off current instantly will create a spark that can damage electronics. That is how a coil in a car works to create a spark by abrupt termination of current. But this is probably way more than anyone wants to know.
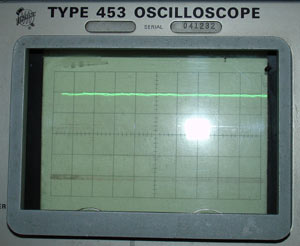
This is at 56% of full throttle. At only 56% of full throttle, speed control is already supplying full power to the motor !
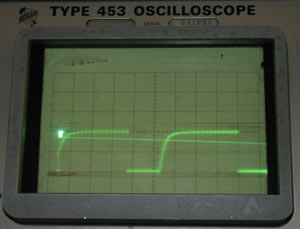
This is the braking shot. The speed control grounds both wires from the motor to negative for braking. Here at partial braking, it ground it for a forth of the cycle for 1/4 braking.
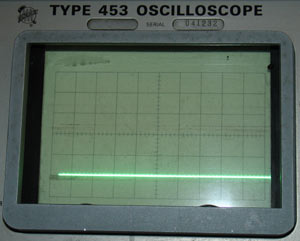
At 45% of full braking throttle, there is already maximum braking ! No wonder brakes are so sensitive when is set to 100%.